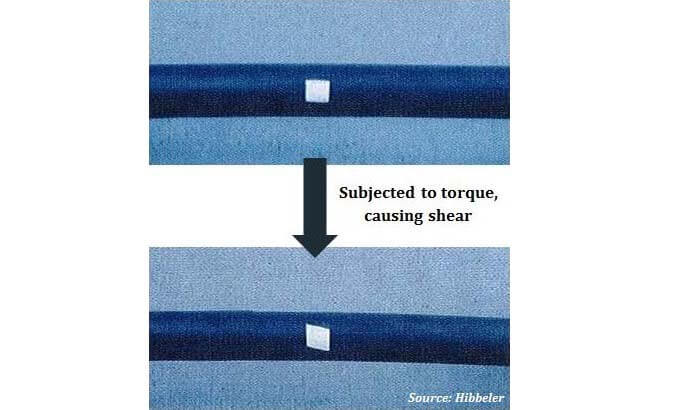
Torsion formula
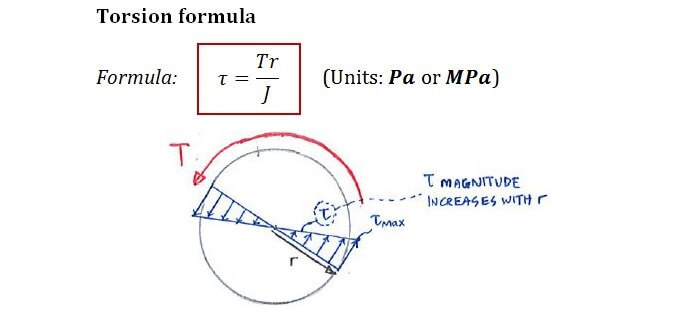
The torsional shear stress can be calculated using the following formula:
 Note:
Note:
-
T is the internal torque at the region of interest, as a result of external torque loadings applied to the member (units: Nm)
-
r is the radius of the point where we are calculating the shear stress (units: m or mm)
-
J is the polar moment of inertia for the cross-section (units: m4 or mm4)
Notice that the higher the radius r, the higher the torsional shear stress. Therefore at rmax, we have τmax.
We usually denote rmax as c:

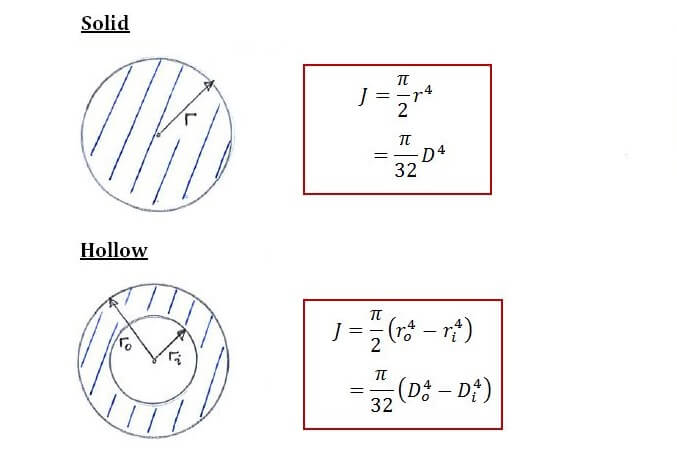
Polar moment of inertia, J
This variable basically measures the resistance to torsional loading. It is a function of the geometry (not mass); the larger the cross-section, the bigger the polar moment of inertia.
We mostly deal with solid or hollow circular cross-sections:
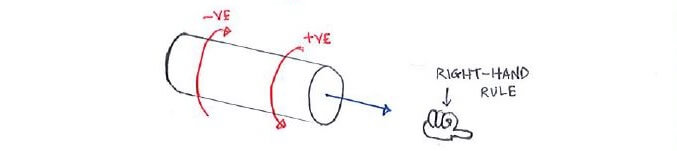
Sign convention
We use the right-hand rule as our positive sign convention. First we define an axis direction, then all torque directions are determined according to the axis and the right-hand rule:
Let’s look at an example now.
Torsion formula
The torsional shear stress can be calculated using the following formula:
Note:
-
T is the internal torque at the region of interest, as a result of external torque loadings applied to the member (units: Nm)
-
r is the radius of the point where we are calculating the shear stress (units: m or mm)
-
J is the polar moment of inertia for the cross-section (units: m4 or mm4)
Notice that the higher the radius r, the higher the torsional shear stress. Therefore at rmax, we have τmax.
We usually denote rmax as c:
Polar moment of inertia, J
This variable basically measures the resistance to torsional loading. It is a function of the geometry (not mass); the larger the cross-section, the bigger the polar moment of inertia.
We mostly deal with solid or hollow circular cross-sections:
Sign convention
We use the right-hand rule as our positive sign convention. First we define an axis direction, then all torque directions are determined according to the axis and the right-hand rule:
Let’s look at an example now.